3D Vision
Media
3D Vision enables the automation of tasks that have long been on operations managers’ wish lists. Many applications that needed to be automated for ergonomic, speed or quality reasons remained manual because a technical solution did not exist.
Kinemetrix 3D Vision provides the depth, angle and contour data needed to guide a robot in more complex tasks. We are ready to automate your wish list. Applications include:
- Bin Picking
- Deracking
- Depalletizing
- Package Handling
- Bag Handling
- Welding
- Order Fulfillment
- Sorting
- Assembly
- Kitting
- Dispensing
- 3D Inspection
3D Imaging
 There is no single imaging technology that meets the needs of every application. Kinemetrix uses a modular approach that allows us to integrate the imaging technology that best fits the application.
There is no single imaging technology that meets the needs of every application. Kinemetrix uses a modular approach that allows us to integrate the imaging technology that best fits the application.
Projected Texture Stereo Imaging
This cost-effective method uses a sensor package containing a projector and 2 cameras. Flexibility is a strong point of this method as the sensor can be fixed or robot mounted. Multiple sensors can be deployed to image the same scene and combined in software. This can solve problems with occlusions (lack of line-of-sight) in certain applications. Imaging is very fast and resolution is good, but may not be good enough for the most demanding applications.
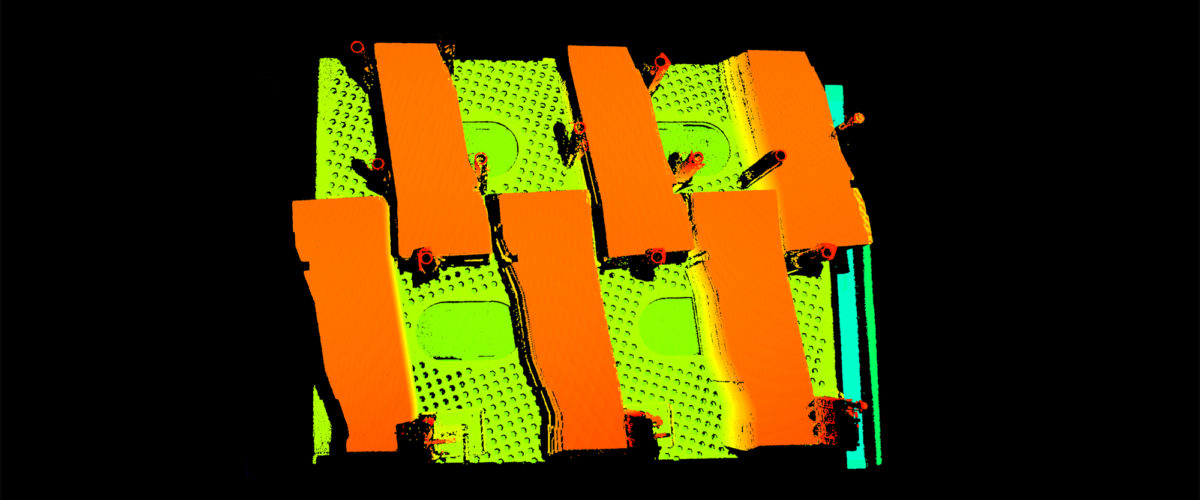
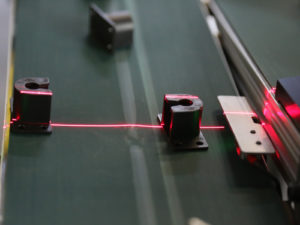 Sheet of Light Scanning
Sheet of Light Scanning
This is the best choice for 3D images of moving parts. The solution requires the integration of a laser line generator, camera, and an encoder on a conveyor to build an image as the part moves. The part is tracked on the conveyor after imaging for robot guidance. Image resolution is excellent.
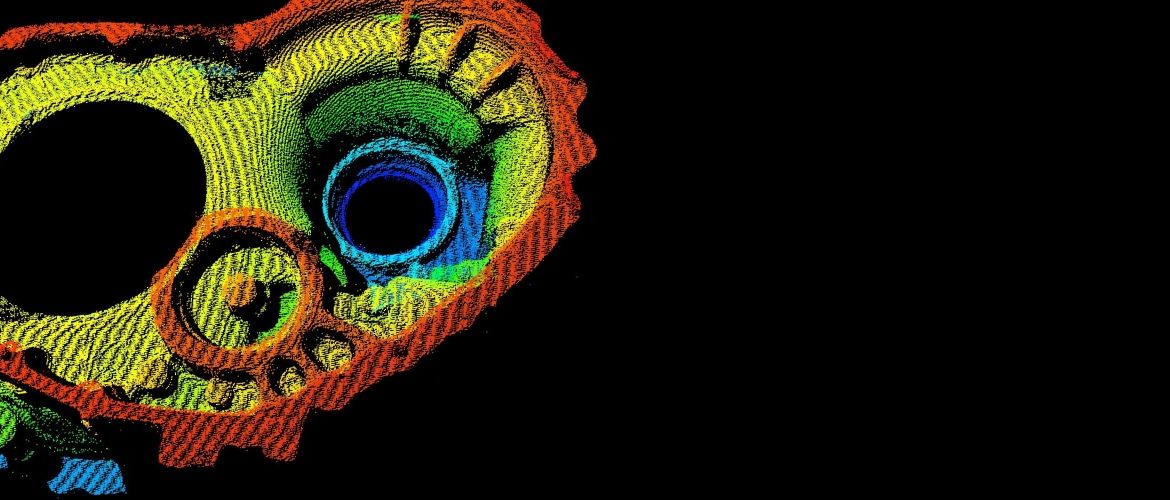
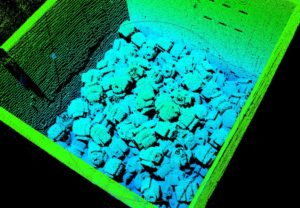
 Encoded Structured Light Imaging
Encoded Structured Light Imaging
This is the most powerful of the imaging approaches. Most-often fixed mounted, this approach requires a brawny projector and 2 cameras. A powerful software algorithm generates patterns and maps those patterns to both cameras, pixel by pixel. The result is excellent image resolution.
The market contains a number of sensor packages that use this approach. They tend to fall into 2 categories:
- Excellent resolution with a small field of view
- A large field of view with reduced resolution.
Kinemetrix uses a proprietary hardware package that avoids the compromise, achieving a very large field of view while maintaining excellent resolution.
| Kinemetrix | Other Large FOV | Other High Res | |
| Point Density | High | Moderate | High |
| Number of Points | 1,000,000 | 180,000 | 985,000 |
| Field of View | Large | Moderate | Small |
| 2000 x 2000 x 1500 | 1340 x 1000 x 1000 | 190 x 175 x 180 |
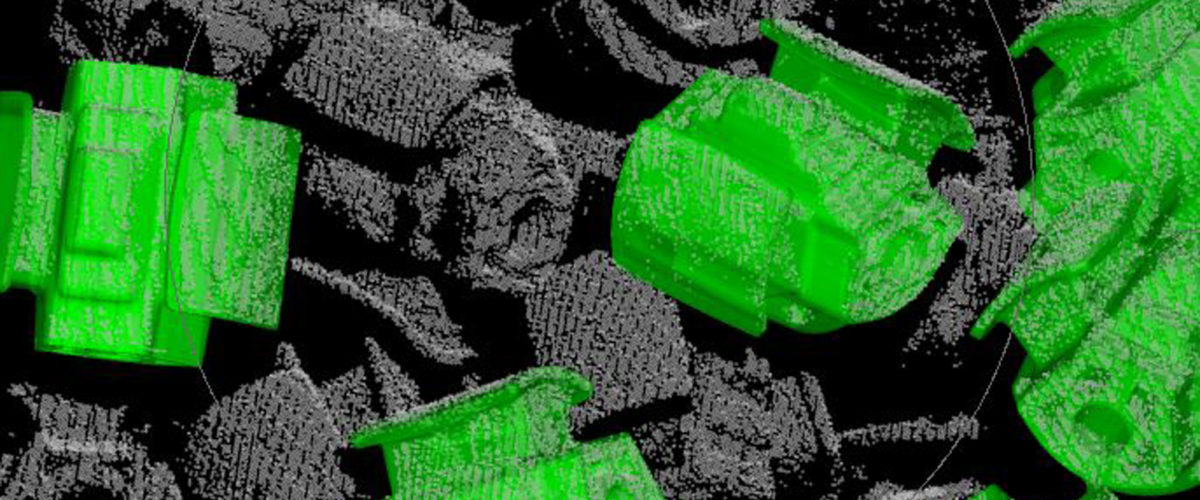
Machine Cognition
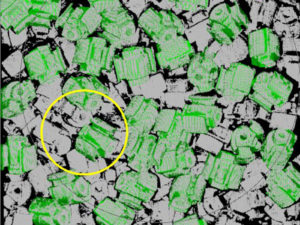 The Machine Cognition module is the analytical core of the system. The data from the Imaging module is processed to identify and locate objects.
The Machine Cognition module is the analytical core of the system. The data from the Imaging module is processed to identify and locate objects.
It’s here that we seek to replicate a human’s ability to see an object. A human does not see with their eyes. The eyes gather data and the brain interprets the data so that the jumble of reflected light answers the question “Where did I put my keys?”
Did we see the ear of our Mickey Mouse keychain poking out of the couch cushions? Or perhaps we saw the general shape of the keys hidden under a piece of paper? It doesn’t matter. The human brain can handle it.
Our approach is similar. The Machine Cognition module allows a variety of identification strategies. Certain applications are well suited to a shape-matching approach – find Mickey’s ear – and others need algorithmic approaches – let’s investigate all suspicious lumps for my keys.
Using multiple strategies at once further boosts the system’s ability to identify objects and report the location and pose to the Guidance module.
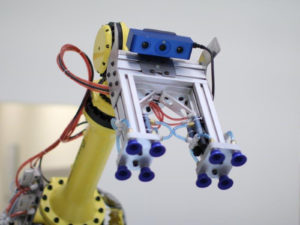
Guidance
 Determining the location and pose of an object is critical, but not sufficient. The robot must be guided to the object in order to grasp it. The Guidance Module handles these tasks:
Determining the location and pose of an object is critical, but not sufficient. The robot must be guided to the object in order to grasp it. The Guidance Module handles these tasks:
- Obstacle Avoidance
- Path Planning
- Communication with Robots and PLCs
Obstacle Avoidance is best understood by considering the bin picking application where a robot is reaching into a bin to extract a part. The preceding modules will identify a number of parts and provide location and pose information for them.
When the bin is completely full, there is little risk of a collision between the robot and the side of the bin. As the bin empties, the solution must account for the sides of the bins and avoid sending the robot to pick a part that would result in a collision.
Path planning is also well explained in the context of a bin picking application. An object at the bottom of a bin may be pickable without collision, but only when the robot moves to it along a certain path. Obstacle Avoidance provides a valid destination. Path Planning defines the route.
Finally, the result of all the analysis must be rapidly and accurately communicated to the robot and/or PLC. Well developed, high speed communication protocols ensure a trouble free integration.
Machine Vision Industry Partnerships
Kinemetrix is a member of the Automated Imaging Association:

Kinemetrix has strategic partnerships with major machine vision hardware and software suppliers, including:
- Cognex
- MVTec – Halcon
- Fanuc
- IDS Imaging
- Keyence